Propulsione
Enciclopedia on line
Medicina
Nel linguaggio medico, andatura caratteristica dei pazienti affetti da morbo di Parkinson, che procedono a rapidi passi col tronco inclinato in avanti.
Trasporti
Il termine è soprattutto usato per i veicoli aerei e marini; nel caso di veicoli terrestri si usa anche il termine trazione. Spesso la parola è usata per indicare il sistema, l’organo, il mezzo di propulsione.
Il problema della p. navale presenta un duplice aspetto in quanto concerne sia le caratteristiche della carena o dello scafo atte a ridurre al minimo la resistenza al moto e a garantire buone qualità nautiche, sia le caratteristiche dell’agente propulsivo e il modo migliore di usarlo. Quanto alle caratteristiche delle carene e degli scafi di minima resistenza, al modo di studiarle e di realizzarle, il problema si affronta in modo sperimentale basando l’analisi su elementi raccolti su navi al vero o, in base alla legge di similitudine meccanica, su loro modelli. Quanto alle caratteristiche dei mezzi propulsivi, essi si distinguono in: forza muscolare dell’uomo, utilizzata nella p. remica; forza del vento, utilizzata nella p. velica; forza meccanica, prevalentemente di origine termica, utilizzata nella p. meccanica.
P. remica
È di origine remotissima e non è stata mai spodestata da altro sistema di utilizzazione della forza dell’uomo, salvo che nel sistema Fleming per la p. a elica manovrata a mano, per imbarcazioni di salvataggio.
P. velica
Anch’essa antichissima, dai tempi delle prime dinastie faraoniche e delle navi egee e fenicie, trovò ambiente favorevole al suo grandioso sviluppo prima nel Mediterraneo, per opera degli Italiani e degli Iberici, poi nei mari settentrionali per opera degli Scandinavi e degli Olandesi, passando gradualmente dalle primitive attrezzature a vele quadre, preziose col vento largo, alle attrezzature latine, a vele triangolari, e auriche, trapezoidali, capaci di utilizzare il vento nei settori prodieri. Nacquero allora, tra il 15° e il 16° sec., i grandi velieri oceanici, che raggiunsero un magnifico sviluppo con i vascelli da guerra del 17° e 18° sec., per toccare infine la perfezione con i clippers mercantili del 19° sec., velieri di 2000-4000 t, con 5000 m2 di vele: manovrati con insuperata abilità, riuscivano a compiere le traversate oceaniche a velocità medie che toccavano, e qualche volta superavano, i 15 nodi. La p. velica, che a questi brillanti risultati univa i pregi di una grande economia e di un’autonomia praticamente illimitata, poté resistere per quasi un secolo, specie sulle lunghissime rotte, alla concorrenza della p. meccanica, alla quale tuttavia ha dovuto infine cedere il passo, sicché oggi una frazione trascurabile del tonnellaggio mondiale è costituito da velieri, prevalentemente amatoriali o sportivi. Altri sistemi di utilizzazione del vento (rotori Flettner, e altri ricordati più avanti) hanno dato scarsi risultati pratici.
P. meccanica
Intravista fin dal 16° sec., sperimentata alla fine del 18° sec., fu introdotta praticamente al principio del 19° sec. (R. Fulton, 1807), quale combinazione dell’apparato motore a vapore (macchina a vapore di J. Watt) e del propulsore a ruote; tale combinazione fu successivamente perfezionata con l’introduzione dell’elica intorno al 1830, la quale, sebbene di minore rendimento propulsivo, possiede caratteristiche nautiche di gran lunga più favorevoli rispetto alla ruota a pale. Conviene, per i diversi tipi di p. meccanica, accettare la suddivisione in sistemi propulsori convenzionali e non convenzionali.
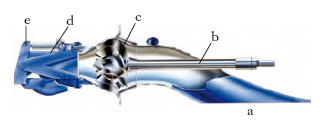
La categoria dei sistemi propulsori convenzionali è costituita dalla sola elica subcavitante non intubata, oltre che da alcuni sistemi ormai superati (ruota) e dal caso speciale del propulsore cicloidale Voith-Schneider, in cui la p. è ottenuta per mezzo di un disco orizzontale rotante, sistemato sul fondo dello scafo, che porta alla periferia varie pale verticali, orientabili rispetto a un asse, pure verticale. La p. a elica subcavitante (non intubata) è il sistema normale per quasi tutto il naviglio, grande e piccolo, militare o mercantile: deriva dalla rotazione di un’elica, sistemata a poppa (eccetto casi particolari), a opera della coppia motrice creata da un motore e trasmessa dalla linea d’assi; l’elica capta una corrente d’acqua dal lato della direzione del moto e la espelle a velocità più elevata in direzione opposta; dalla variazione della quantità di moto della corrente fluida nell’unità di tempo nasce la spinta sull’imbarcazione. Questo tipo di p. rappresenta il miglior compromesso tra le esigenze di semplicità ed economia costruttiva da una parte, di rendimento, sicurezza, elasticità di funzionamento dall’altra.
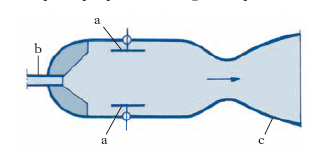
Dei sistemi propulsori non convenzionali fanno parte vari sistemi di recente impiego o concezione, di applicazione tuttora limitata a casi particolari, tra i quali sono la p. a coppia di eliche controrotanti, la p. a elica intubata detta anche in mantello, la p. a elica supercavitante, la p. a idrogetto, la p. con elica aerea (idroscivolante, hovercraft) e la p. con reattore a gas. La p. a coppia di eliche controrotanti consiste nell’accoppiamento su un solo asse di due eliche, l’una contigua all’altra, mosse da due alberi coassiali indipendenti; confrontata con l’elica singola, la coppia controrotante presenta, a parità di diametro, un rendimento superiore del 5-7% con una frequenza di rotazione minore di circa il 35%, ma implica serie difficoltà di progetto, a causa dei problemi di bilanciamento e d’interferenza reciproca, e altre difficoltà d’installazione e di costo, a causa delle complicazioni meccaniche connesse; si applica normalmente nei mezzi subacquei. La p. a elica intubata ha la particolarità che l’elica è sistemata all’interno di un condotto (mantello) di diametro circa uguale a quello dell’elica, che ha lo scopo di modificare la vena affluente e defluente dell’elica, a tutto vantaggio del rendimento del propulsore; il complesso elica-mantello ha le stesse dimensioni d’ingombro dell’elica libera di pari prestazioni; il sistema si presenta conveniente solo per alcune navi particolari, quali rimorchiatori e unità militari veloci. La p. a elica supercavitante si basa sul principio che l’elica, come indicato dal nome, è progettata espressamente per funzionare in regime di piena cavitazione e, rispetto all’elica comune, è caratterizzata da un tipico profilo a cuneo, che serve per evitare i danni conseguenti alla formazione, per cavitazione, di bolle di vapor acqueo; è nata per soddisfare le esigenze di velocità di rotazione sempre più spinte e il suo impiego è quindi limitato a unità molto veloci, come aliscafi, motoscafi da competizione ecc. La p. a idrogetto si basa sul principio (fig. 1) di creare una spinta variando nell’unità di tempo la quantità di moto di una massa d’acqua, incanalata in un condotto di aspirazione, impiegando una pompa meccanica (assiale o centrifuga). La p. a getto d’acqua presenta i seguenti vantaggi: sicurezza di funzionamento, semplicità costruttiva e, soprattutto, ottimo rendimento a grandi velocità; permette inoltre di eliminare il timone (poiché le manovre sono compiute orientando il getto) e di ottenere una rapida inversione di spinta mediante la manovra di un inversore che convoglia il getto verso la prua. L’idrogetto deve quindi considerarsi il sistema d’elezione al di là del campo di velocità coperto dalle eliche supercavitanti, cioè oltre 55-60 nodi, fino a 80 nodi e oltre. La p. con elica aerea è adatta solo per unità di modeste dimensioni.
P. aerea
In aeronautica, la fonte di energia per la p. è quella potenziale chimica del combustibile a bordo; la reazione con ossigeno comburente (quello dell’atmosfera per gli esoreattori, quello a bordo per gli endoreattori) sviluppa calore, trasformato in energia meccanica dal propulsore; essa conferisce velocità al velivolo in decollo e serve in volo a vincere resistenze e gravità e a variare la velocità. La forza propulsiva (spinta) deriva da azioni su superfici solide del propulsore (fisse o mobili rispetto al velivolo) e legate alla variazione nell’unità di tempo di quantità di moto dei gas impegnati nella p. (aria per l’elica, aria e gas combusti per i turboreattori, prodotti gassosi vari per i missili ecc.). In un riferimento solidale al velivolo, la spinta si valuta come differenza tra la quantità di moto del gas uscente dal sistema di p. (disco dell’elica, turbogetto ecc.) e quella del gas in ingresso (legata alla velocità di avanzamento, o di volo, del velivolo). Il rendimento propulsivo è il rapporto tra potenza utilizzata dal velivolo (pari al prodotto scalare di spinta e velocità di volo) e potenza disponibile (somma di potenza utilizzata e incremento di energia cinetica nell’unità di tempo del fluido che attraversa il sistema di propulsione). Tale rendimento è nullo a velocità di volo nulla (in fase di decollo, in cui si ha spinta massima) e unitario per velocità di uscita del fluido pari a quella di volo (cioè per perdita cinetica allo scarico nulla, che si ha però con spinta nulla). Il rendimento complessivo del sistema motore è il prodotto di rendimento propulsivo e rendimento di conversione del calore in energia meccanica (disponibile all’albero dell’elica o conferita come energia cinetica ai gas nei turboreattori). L’obiettivo di un elevato rendimento, compatibile con vincoli di leggerezza, sicurezza di funzionamento, durata, costo e rapidità di costruzione, manutenzione, ingombro, tipo d’impiego, determina il tipo di propulsore più idoneo per le varie applicazioni. Per velocità massime fino a 700-750 km/h, l’elica (p. a getto non diretto) offre i maggiori rendimenti propulsivi (oltre 0,85 per buone eliche); essa impegna grandi masse d’aria, ottenendo in volo a valle del disco le più basse velocità possibili. L’elica è azionata da motore alternativo (motoelica) o da turbina a gas (turboelica). Nei gruppi a elica, l’aria da questa interessata per la p. è distinta da quella di motore o turbina, anche se i prodotti di combustione contribuiscono alla spinta (se i condotti di scarico sono in verso opposto all’avanzamento). Il rendimento propulsivo dell’elica con profili subsonici si riduce se la velocità di estremità delle pale (risultante di quelle periferica e di volo) è vicina a quella del suono.
Per velocità di avanzamento oltre i 750-800 km/h, all’elica subsonica, anche se bene adattata si preferisce la p. a getto diretto (detta a reazione) con cui si ha un buon rendimento globale e in cui l’aria di alimentazione coinvolta nel processo termodinamico provvede anche direttamente alla propulsione. Si hanno diversi tipi di propulsori a reazione, dal turboreattore semplice ai turboreattori a doppio flusso. Nel turboreattore semplice, caratterizzato da ingombro frontale e peso limitati, la spinta (che può aumentare con una postcombustione prima dell’ugello di scarico) è assicurata dalla sola corrente d’aria impegnata nel processo termodinamico. Nei turboreattori a doppio flusso (turbofan), un flusso d’aria secondario (pari a 1-6 volte quello principale) contribuisce alla spinta, assicurando rendimenti propulsivi maggiori a fronte di maggior peso e ingombro del motore. Un alto rendimento propulsivo a elevate velocità di volo si ottiene con turboreattori a eliche controrotanti non intubate (propfan), aventi un rapporto tra flussi secondario e primario superiore a 50. Essi possono considerarsi come turboeliche in cui due dischi controrotanti con numerose pale (8-10) sostituiscono l’unica elica a poche pale (3-5). Gli stadi controrotanti conferiscono maggiore energia al fluido captato e maggiore assialità del flusso in uscita, riducendo le perdite cinetiche allo scarico. Le pale presentano elevato svergolamento e sono marcatamente rivolte all’indietro (forma detta a scimitarra). Questa soluzione minimizza le perdite fluidodinamiche e garantisce rendimenti propulsivi elevati a velocità di avanzamento prossime ai 900 km/h. Per velocità maggiori è conveniente l’autoreattore, un condotto sagomato con presa, diffusore, camera di combustione e ugello, in cui si ha compressione per effetto dell’altissima velocità.
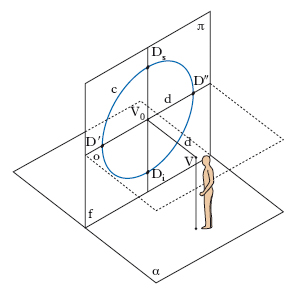
Oltre ai propulsori ad aria esterna (esoreattori), per impieghi speciali si usano gli endoreattori, per conferire a velivoli intercettori e missili velocità rilevanti, per il volo in aria molto rarefatta e per la p. astronautica. I propellenti si trasformano in gas a elevata pressione e temperatura, i quali effluendo ad altissima velocità (a spese di parte del calore prodotto) producono la spinta (uguale alla quantità di moto dei gas espulsi nell’unità di tempo) che è non nulla anche per velocità di volo superiore a quella di uscita dei gas. In fig. 2 sono riportati, in funzione di quota e velocità, i campi d’impiego precipui dei vari sistemi propulsivi, supposto il moto a velocità circa costante, separati approssimativamente da linee di confine orientative.
Propulsori
Propulsori ad azione e a getto
Si chiama propulsore ogni organo, complesso meccanico o dispositivo che ha lo scopo di comunicare al veicolo da cui è portato la forza che ne produce e mantiene il moto. I propulsori sono suddivisi in due principali categorie. La prima comprende i propulsori a reazione del mezzo (correntemente indicati anche come propulsori ad azione), per i quali la p. trae origine dalla reazione del mezzo materiale in cui o su cui si trova il veicolo (acqua, aria, strada, rotaia ecc.) all’azione che il propulsore (elica, ruota ecc.) esercita su esso; la seconda categoria comprende i propulsori a reazione propriamente detti, o propulsori a getto, per i quali l’azione propulsiva nasce per l’espulsione (anche, eventualmente, nel vuoto) di masse portate a bordo dal veicolo; in qualche caso, per es. in certi aeromobili, vi sono propulsori misti, costituiti dalla combinazione di propulsori dell’una e dell’altra categoria.
I propulsori a reazione del mezzo sono genericamente costituiti da un motore che aziona organi propellenti (essi stessi detti propulsori), quali ruote nel caso di veicoli terrestri, eliche nel caso di navi e aeromobili ecc.; il complesso prende anche il nome di gruppo motopropulsore, o semplicemente motopropulsore. Tralasciando il caso dei veicoli terrestri, propulsi da ruote, i propulsori di questo tipo per veicoli aerei e marini sono caratterizzati dal fatto che la forza propulsiva deriva da pressioni prodotte dallo spostamento con velocità opportuna di superfici solide rigide (comandate dal motore) entro il fluido ambiente (aria o acqua); in questo caso il motore e il propulsore costituiscono due parti distinte. Per es., sono di questo tipo i propulsori a elica (propulsori elicoidali) per le navi e per i velivoli.
I propulsori a getto, o reattori, sono caratterizzati dal fatto che la forza propulsiva deriva da azioni che riguardano direttamente l’insieme motore e propulsore, che, in questo caso, costituisce un tutto unico; il fluido interessato nel processo propulsivo è costituito, in tutto o in parte, da prodotti di combustione di sostanze adatte (combustibile più aria ambiente, ovvero miscele combustibile-comburente, ➔ propellente, che non hanno bisogno dell’aria ambiente per bruciare). Tra i propulsori che utilizzano l’aria esterna (esoreattori) sono da annoverare gli autoreattori, i pulsoreattori e i turboreattori. I propulsori che usano propellenti hanno il nome di endoreattori (➔) e sono i propulsori tipici dei missili d’alta quota e dei veicoli spaziali (per i propulsori chimici ➔ missile).

Altri tipi di propulsori
Altri tipi di propulsori, in fase di studio (le realizzazioni riguardano solo prototipi), permettono di raggiungere velocità di efflusso di gran lunga più elevate di quelle raggiungibili nei propulsori chimici e pertanto consentirebbero, in una eventuale applicazione, una diminuzione della massa propellente da stivare, sollevare e accelerare per realizzare una determinata missione. Presentano però lo svantaggio che per essi il rapporto spinta/peso risulta basso. Tali tipi avanzati di propulsori possono raggrupparsi nelle seguenti categorie: nucleari (o a energia nucleare), elettrici, fotonici. I propulsori elettrici possono classificarsi in elettrotermici, elettrostatici ed elettromagnetici. Un esempio di propulsore elettrotermico è costituito dagli arcogetti, nei quali una differenza di potenziale elettrico applicata a opportuni elettrodi (a in fig. 3) innesca in una camera un arco elettrico che riscalda il fluido, entrante da b, successivamente accelerato ed espulso attraverso un ugello c. Le velocità di efflusso potrebbero essere aumentate di circa 20 volte rispetto a quelle conseguibili con propulsori chimici, pur trattandosi ancora di propulsori a scambio di calore; i problemi applicativi riguardano il basso valore della spinta, il basso rapporto spinta/peso del propulsore (dell’ordine di 10–4, contro le diverse decine dei propulsori chimici). Fra i propulsori elettrostatici possono citarsi quelli a ioni (o ionici), nei quali ioni positivi, prodotti per bombardamento elettronico di una corrente gassosa (fig. 4), sono sottoposti all’azione di un campo elettrostatico e accelerati fino a velocità elevatissime (dell’ordine di 105 m/s). Le spinte ottenute sono molto basse (qualche newton), i rapporti spinta/peso dell’ordine di 10–4. Nei propulsori fotonici ci si basa sulla possibilità di scambio di quantità di moto tra fotoni e una superficie materiale che li emetta, li assorba o li rifletta: per es., un semplice propulsore del genere potrebbe essere costituito (vela solare) da un’ampia superficie esposta alla radiazione solare. Il limite dei propulsori fotonici e di molti propulsori elettrici è dato dalle basse spinte; tali spinte però possono essere ottenute per lungo tempo: a motivo di ciò l’uso di tali propulsori è preconizzato per viaggi interplanetari di lunga durata, o, più semplicemente, per manovre d’assetto di satelliti; per l’energia elettrica necessaria si può far ricorso a cellule fotovoltaiche.
© Istituto della Enciclopedia Italiana - Riproduzione riservata


