Macchine molecolari
Enciclopedia Italiana - VII Appendice (2007)
Macchine molecolari
I congegni biochimici che presiedono a tutte le funzioni vitali, dalla sintesi dell'ATP (adenosintrifosfato) ai movimenti muscolari, ci dicono che il concetto di macchina, così familiare nel mondo macroscopico dove gli oggetti hanno dimensioni dell'ordine del metro, può essere esteso al mondo microscopico delle molecole. Questi dispositivi di dimensione nanometrica (un nanometro, nm, è pari a un miliardesimo di metro) sono infatti costituiti da componenti molecolari opportunamente assemblati al fine di eseguire movimenti meccanici in seguito all'azione di stimoli energetici esterni; si tratta, pertanto, di vere e proprie macchine a livello molecolare, chiamate anche nanomacchine con evidente riferimento alle loro dimensioni. Le m. m. naturali sono molto complesse (Goodsell 2004), sia per il numero di componenti molecolari sia per la struttura e, quindi, inimitabili. La conoscenza sempre più approfondita della loro composizione e funzionalità e i recenti progressi della chimica hanno, però, permesso di ottenere i primi prototipi di m. m. artificiali che, nonostante siano estremamente più semplici rispetto a quelle biologiche, stanno aprendo prospettive del tutto nuove in vari campi della scienza e della tecnologia.
Nanomacchine naturali
Il movimento è uno degli attributi principali della vita. I sistemi viventi sono forniti di aggregati di molecole molto complessi (gli enzimi) che lavorano all'interno delle cellule come vere e proprie macchine per soddisfare i bisogni delle cellule stesse (Goodsell 2004): trasporto di materiale molecolare, copia e trasduzione del codice genetico nelle proteine, scambio di informazioni con altre cellule e così via. Anche tutti i movimenti macroscopici degli organismi viventi - dai batteri alle balene - e le funzioni più nobili dell'uomo - dal parlare al pensare - sono conseguenze di movimenti molecolari. L'esistenza delle nanomacchine naturali è nota da molto tempo, ma solo di recente si è cominciato a studiare i meccanismi chimici del loro funzionamento, evidenziando che questi sistemi operano mediante movimenti meccanici di vario tipo, di frequente complessi e interconnessi, ma a volte anche semplici, come rotazioni e spostamenti lineari, simili a quelli effettuati da macchine del mondo macroscopico. Pure se non sono ancora chiariti in maniera esaustiva i suddetti meccanismi di funzionamento delle nanomacchine naturali, è comunque possibile rappresentare schematicamente in forma grafica le loro funzioni.
Alcuni esempi di nanomacchine naturali
Una trattazione più approfondita (vedi Balzani, Credi, Venturi 2003) esula dalle ragioni di questo testo e saranno illustrati solo alcuni esempi tipici che sono suddivisi in relazione al tipo di movimento effettuato.
Cambiamenti di forma. - Negli organismi viventi, se ogni enzima fosse sempre attivo si avrebbe una situazione totalmente caotica: la sostanza prodotta da un enzima sarebbe immediatamente distrutta dall'enzima antagonista attraverso un inutile ciclo di reazioni. Per evitare questi problemi, gli enzimi principali vengono accuratamente regolati: vale a dire che essi sono attivati solo quando la sostanza da essi prodotta appare necessaria alla cellula e disattivati in caso contrario. Un tipico esempio di quanto detto è l'enzima aspartato transcarbamilasi, detto anche ATCasi (Goodsell 2004), che è presente nei batteri e stabilisce quando la timina e la citosina devono essere sintetizzate. Questo enzima è composto da sei grandi unità catalitiche e da sei unità regolatorie più piccole. Il suo sito attivo è collocato nel punto dove due unità catalitiche si toccano; se esse sono in stretto contatto, un amminoacido di una di loro si estende sul sito attivo dell'altra, bloccandolo; se, di contro, le due unità sono leggermente separate, i loro siti attivi risultano liberi e funzionano. È compito specifico del sistema regolatorio stabilire in quale situazione si devono trovare i siti attivi dell'enzima: quando i reagenti della reazione in cui l'enzima è coinvolto sono presenti in abbondanza, si legano ai siti attivi tenendoli in funzione; quando, invece, sono i prodotti a essere presenti in abbondanza, uno di essi (citidina trifosfato, CTP) si lega a un'unità regolatoria, costringendo l'enzima a cambiare forma e a chiudere il sito attivo.
Enzimi come quello appena descritto, il cui funzionamento è collegato a un cambiamento di forma, vengono detti allosterici e sono molto frequenti in natura; effetti allosterici di questo tipo rappresentano, infatti, un modo di fornire al sistema segnali di feedback per tenere sotto controllo un processo chimico.
Movimenti lineari. - Un esempio ben noto di motore naturale che sviluppa un movimento di tipo lineare è rappresentato dalla miosina, termine usato per indicare numerose classi di proteine che sono alla base di tutti i movimenti muscolari volontari e involontari. Le molecole di miosina, ciascuna costituita da una lunga coda a cui sono collegate due grosse teste, nelle cellule dei muscoli sono assemblate tramite le code per dare un filamento dal quale si protendono le teste; queste raggiungono un filamento di actina (una proteina assimilabile a una scala) e si attaccano a esso. L'idrolisi di una molecola di ATP fornisce al sistema energia che viene utilizzata per far cambiare radicalmente la forma delle teste della miosina e per costringerla a spostarsi lungo il filamento di actina. In un muscolo che si contrae rapidamente, ciascuna unità di miosina si muove cinque volte al secondo, percorrendo una distanza di circa 10 nm.
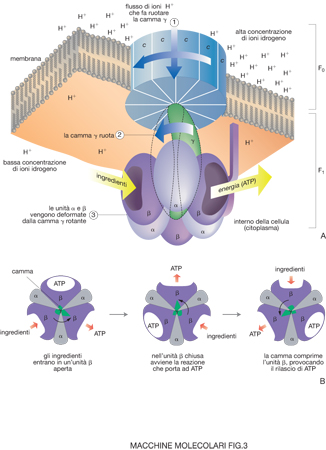
Movimenti rotatori. - Una delle nanomacchine naturali più studiate è certamente quella preposta alla sintesi dell'ATP, molecola che fornisce l'energia per le funzioni vitali. Questo congegno, illustrato nella fig. 1, ha dimensioni dell'ordine di 10 nm ed è costituito da un'unità c, formata da proteine a elica che attraversano una membrana, e da un'unità γ solidale a c. Quando la concentrazione dei protoni all'interno della membrana è inferiore a quella esterna, si genera un flusso di protoni che causa la rotazione di c e, di conseguenza, di γ (fig. 1 A). Quest'ultima unità agisce come una camma meccanica che, ruotando, deforma in successione tre siti nel sistema proteico che la circonda, causando, in ognuno di essi, la trasformazione di adenosindifosfato (ADP) e fosfato inorganico (Pi) in ATP (fig. 1 B).
Il funzionamento di questa nanomacchina, però, è più complicato di quanto appena detto, in quanto essa deve essere vista (fig. 1 A) come la combinazione di due motori molecolari, F1 e F0, uniti alla stessa camma γ, che tentano di ruotare in direzione opposta. Il motore F0, come sopra accennato, sfrutta il gradiente protonico per girare in una direzione, mentre F1 usa l'energia libera prodotta dall'idrolisi dell'ATP per ruotare nella direzione opposta. Quando prevale F0, come accade, per es., nella fotosintesi batterica, F1 gira a rovescio e quindi sintetizza ATP a partire dai suoi costituenti, ADP e Pi; quando, invece, prevale F1, è F0 che gira a rovescio e il sistema funziona come una pompa di protoni azionata dall'energia dell'ATP.
Nanomacchine artificiali
L'idea di costruire m. m. artificiali fu teorizzata nel 1959 da R.P. Feynman (1960), premio Nobel per la fisica nel 1965, ma per il suo sviluppo si dovette aspettare fino agli anni Ottanta, periodo in cui K.E. Drexler (1986) la riprese, prospettando la possibilità di costruire un robot di dimensioni nanometriche. Questo nanorobot, denominato assembler, avrebbe dovuto essere capace, secondo Drexler, di costruire, atomo per atomo, qualsiasi cosa, comprese repliche di sé stesso. L'idea di procedere alla costruzione di m. m. atomo per atomo non è però condivisa dai chimici, che la considerano assolutamente non realistica (Smalley 2001; Balzani, Credi, Venturi 2003). I chimici, infatti, sapendo che gli atomi sono specie molto reattive e che, quindi, non possono essere presi da un materiale e portati su un altro, come fossero semplici mattoni, pensano che la costruzione dal basso di congegni e macchine a livello nanometrico si possa e si debba fare molecola per molecola, partendo da molecole programmate. Essi sanno anche che sarebbe assolutamente folle cercare di imitare quanto avviene in natura, dove le m. m. si formano per autoassemblaggio e sono di una estrema complessità. Quello che si può fare nel campo delle macchine artificiali, almeno allo stato attuale, è progettare e costruire sistemi molto semplici, costituiti da pochi componenti molecolari.
Progettazione
La fase della progettazione è, ovviamente, la più delicata e in quest'ambito è particolarmente critico l'aspetto che riguarda il tipo di energia da usare per far lavorare la nanomacchina. Come per le macchine del mondo macroscopico, infatti, anche per le m. m. è possibile ottenere movimento soltanto se si fornisce energia.
Per la maggior parte delle macchine del mondo macroscopico l'energia necessaria è prodotta da reazioni fra ossigeno e sostanze che possiedono un alto contenuto energetico (ossia combustibili). Tali reazioni sono fatte avvenire in motori a combustione interna. Queste reazioni, che comportano sia alte temperature sia elevate pressioni, non si possono usare per alimentare le fragili m. m., le quali, tuttavia, possono sfruttare delle reazioni chimiche, purché avvengano in condizioni blande. Questo, infatti, è proprio quello che succede nelle nanomacchine biologiche, in cui le reazioni di combustione, che sono generatrici dell'energia indispensabile per il loro funzionamento procedono attraverso molti stadi successivi, in ciascuno dei quali è messa in gioco solo una piccola quantità di energia. Comunque, a parte questa differenza tecnica, rimane il fatto che sia le macchine macroscopiche sia quelle biologiche funzionano consumando un combustibile. Questo, inevitabilmente, comporta la formazione di prodotti di scarto, la cui eliminazione appare quale condizione necessaria per preservare il buon funzionamento della macchina.
Le ricerche condotte sulle m. m. artificiali hanno mostrato che è possibile far funzionare questi sistemi, non soltanto mediante energia chimica utilizzando opportuni reagenti in grado di indurre reazioni acido-base o redox (riduzione-ossidazione), ma anche, e in modo più conveniente, mediante energia elettrica e luminosa. La prima viene fornita attraverso elettrodi e agisce inducendo reazioni redox, mentre la seconda può operare indirettamente provocando reazioni acido-base o redox, oppure direttamente tramite reazioni di fotoisomerizzazione che causano grandi cambiamenti conformazionali. Queste due forme di energia risultano particolarmente interessanti, in quanto sistemi che siano opportunamente scelti possono operare senza formare nessun prodotto di scarto.
Altro aspetto critico in fase di progettazione è quello che riguarda la necessità di controllare in modo soddisfacente i movimenti delle nanomacchine artificiali e a tal scopo è opportuno che siano verificati quattro requisiti fondamentali: a) il sistema deve possedere solo due situazioni strutturalmente stabili, osservabili mediante segnali ben distinti; b) una delle due strutture deve essere più stabile dell'altra, così da avere una condizione iniziale in cui è presente una sola di esse; c) con uno stimolo esterno deve essere possibile destabilizzare la struttura iniziale e costringere quindi il sistema a riorganizzarsi nell'altra; d) con un secondo stimolo esterno deve essere possibile annullare l'effetto destabilizzante e ritornare alla struttura originale.
Esempi di nanomacchine artificiali
In analogia con le considerazioni fatte per introdurre le nanomacchine naturali, saranno illustrati soltanto alcuni esempi tipici, suddivisi in base al tipo di movimento effettuato.
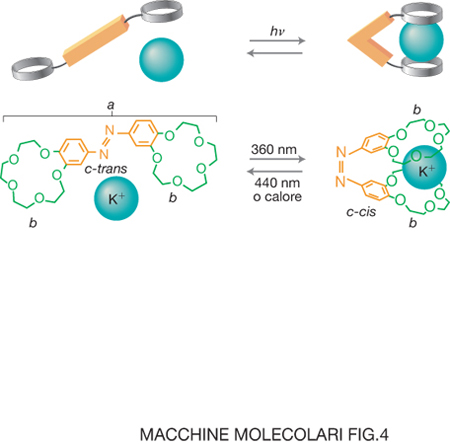
Cambiamenti di forma. - Uno dei primi esempi riportati di m. m. artificiale è il sistema a, illustrato in fig. 2. Esso è costituito da due molecole ad anello, chiamate eteri corona (b), collegate a un'unità centrale −N=N− (c) che può cambiare struttura (passando dall'isomero trans a quello cis e viceversa) per assorbimento di luce di appropriata lunghezza d'onda. Quando una soluzione contenente questo sistema nella forma trans viene irradiato con luce di 360 nm, il cambiamento di struttura dell'unità centrale c causa l'avvicinamento dei due anelli laterali b, che possono così racchiudere uno ione di dimensioni opportune, per es. K+. Utilizzando luce visibile o lasciando il sistema al buio, si verifica il processo inverso con conseguente rilascio dello ione. Questa azione meccanica è paragonabile a quella di una pinza di dimensioni nanometriche che, in futuro, potrebbe forse portare alla costruzione di sistemi capaci di ripulire un organismo da sostanze dannose.
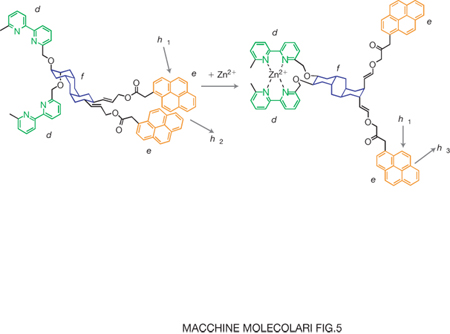
Sono stati progettati e costruiti numerosi sistemi artificiali nei quali è possibile indurre rimarchevoli cambiamenti di forma mediante stimoli chimici, fotochimici oppure elettrochimici. Un esempio è rappresentato dal sistema di fig. 3, che consiste di quattro unità, due dipiridiniche (d) e due pireniche (e), collegate da un gruppo centrale f chiamato peridroantracene. Le due unità e sono molto vicine e interagiscono, dando luogo, se stimolate in modo opportuno con luce, a un particolare segnale di fluorescenza. In seguito ad aggiunta di ione zinco (Zn2+), che si va a legare alle due unità d, l'elemento centrale f subisce una ristrutturazione che si riflette, a sua volta, sulle posizioni delle unità e che vengono allontanate, come indicato dal cambiamento del segnale di fluorescenza.
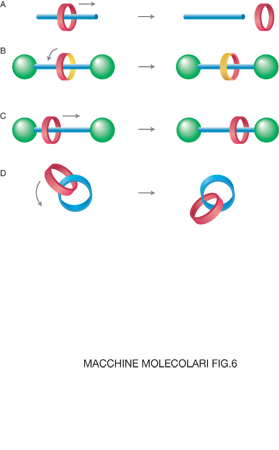
Movimenti lineari. - La maggior parte delle ricerche nel campo delle m. m. artificiali capaci di compiere movimenti lineari è attualmente concentrata su sistemi chiamati pseudorotassani e rotassani (fig. 4). Uno pseudorotassano è un sistema formato da una molecola filiforme infilata in una molecola ad anello (fig. 4 A), mentre un rotassano può essere immaginato come formato da uno pseudorotassano in cui, alle estremità del componente lineare, sono stati aggiunti due gruppi ingombranti (stoppers) per impedire lo sfilamento dell'anello (fig. 4 B e C). Sistemi di questo genere, se accuratamente progettati, possono, mediante l'uso di opportuni stimoli energetici, effettuare movimenti meccanici come quelli mostrati nella fig. 4.
Di seguito sono illustrati alcuni esempi di m. m. basate su tali sistemi, scelti anche per mostrare come sia possibile utilizzare vari tipi di energia per far avvenire il mo-vimento meccanico.

In un sistema pistone-cilindro azionato dalla luce, il movimento di infilamento-sfilamento dei due componenti molecolari di uno pseudorotassano (fig. 4 A) ricorda quello di un pistone all'interno di un cilindro, e in fig. 5 è illustrato un esempio reale di sistema in grado di comportarsi in tale modo in seguito a uno stimolo luminoso. Il componente filiforme g con-tiene l'unità −N=N− già vista in precedenza, che può cambiare forma in seguito a eccitazione luminosa. Quando tale unità è nel suo isomero trans, il componente filiforme, avendo caratteristiche di elettron-donatore, si infila spontaneamente nel componente ciclico h, che ha caratteristiche di elettron-accettore, per dare lo pseudorotassano h∙g-trans. Per eccitazione con luce di 360 nm, la quale determina il cambiamento strutturale dell'unità −N=N− dall'isomero trans all'isomero cis, il componente filiforme g (fig. 5) va a interagire in modo molto meno efficace con h e, come conseguenza, esce dal macrociclo. Con radiazioni di altra lunghezza d'onda, o semplicemente lasciando il sistema al buio, l'unità −N=N− ritorna nella sua configurazione iniziale e i due componenti si infilano nuovamente uno nell'altro.
Appare importante sottolineare che fra i numerosi sistemi di tipo pseudorotassano finora costruiti questo è l'unico a essere caratterizzato dal fatto che il movimento di infilamento-sfilamento non è accom-pagnato dalla formazione di prodotti di scarto.
In un rotassano, il movimento dell'anello lungo il filo (fig. 4 C) corrisponde, a livello molecolare, al movimento di una 'navetta' (shuttle) lungo un binario. Un esempio di questo tipo, ossia una navetta azionata da energia chimica, è rappresentato dal rotassano mostrato in fig. 6, formato dall'anello i e dal componente lineare l, in cui sono presenti due unità diverse, l1 e l2; la prima unità è costituita da un ammonio secondario, che può essere deprotonato reversibilmente ad ammina, mentre la seconda è formata dal dicatione dipiridinio, che ha carat-teristiche di elettron-accettore. Queste unità rappresentano due potenziali 'stazioni' per l'anello i, dal momento che esso può interagire sia con l1, grazie alla formazione di legami a idrogeno, che con l2, dando un'interazione di tipo donatore-accettore. Poiché il primo tipo di interazione è più forte del secondo, l'anello si trova inizialmente sulla stazione l1. Se, però, alla soluzione contenente il rotassano viene aggiunta una base, l'unità ammonio l1 viene deprotonata e perde così la capacità di formare legami a idrogeno con l'anello i; come conseguenza, l'anello si sposta sulla stazione l2, con la quale può dare interazioni donatore-accettore.
Se poi, a questo punto, si aggiunge alla soluzione un acido, l'unità ammonio l1 viene ricostituita e l'anello i torna su questa stazione. Il movimento alternato di i fra l1 e l2 può essere ripetuto molte volte, perché la reazione acido-base che lo governa è perfettamente reversibile. L'unica limitazione deriva dal fatto che le successive aggiunte di base e di acido comportano la formazione di sostanze che, alla lunga, compromettono il funzionamento del sistema.
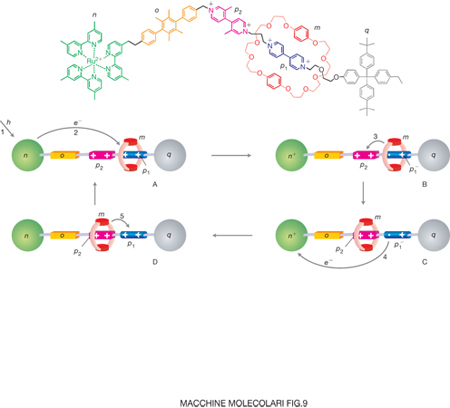
Lo stato di sofisticazione raggiunto dalla progettazione e dalla sintesi delle m. m. è chiaramente evidenziato dalla complessità strutturale e funzionale del sistema mostrato nella fig. 7, una navetta controllata da energia luminosa. Si tratta di un rotassano costituito da un componente ad anello m, con caratteristiche di elettron-donatore, e da un componente lineare formato da: il complesso [Ru(bpy)3]2+ (n), che svolge sia la funzione di stopper sia quella fondamentale di assorbire la luce utilizzata dal sistema per lavorare; uno spaziatore rigido o; un'unità 4,4'-dipiridinio (p1) e un'unità 3,3'-dimetil-4,4'-dipiridinio (p2), che avendo entrambi caratteristiche elettron-accettrici svolgono il ruolo di stazioni per l'anello m; infine un secondo stopper, q. La situazione iniziale del sistema è quella in cui il macrociclo m circonda l'unità p1, che costituisce un elettron-accettore migliore di p2. In seguito a eccitazione luminosa del componente [Ru(bpy)3]2+ avvengono nel sistema una serie di movimenti elettronici e nucleari che possono essere descritti molto schematicamente come segue. In conseguenza all'assorbimento di luce (processo 1) si ottiene uno stato eccitato di n che trasferisce un solo elettrone alla stazione p1 (processo 2) circondata dall'anello m. Il trasferimento elettronico fa in modo che la stazione p1 perda le caratteristiche di elettron-accettore, il che destabilizza la sua interazione con m; l'anello si muove allora sulla stazione p2 (processo 3); a questo punto un trasferimento elettronico, opposto a quello fotoindotto, dalla stazione ridotta p1− (non più circondata da m) all'unità fotoattiva ossidata n+ (processo 4) ripristina il carattere elettron-accettore della stazione p1; in seguito a questo reset elettronico, l'anello m torna sulla stazione p1 (processo 5), riportando il sistema alla struttura iniziale.
In conclusione, ogni impulso luminoso causa, attraverso quattro stadi, il movimento alternato dell'anello lungo il filo senza generare prodotti di scarto, così che questo sistema può essere considerato un motore lineare a quattro tempi, azionato dalla luce.
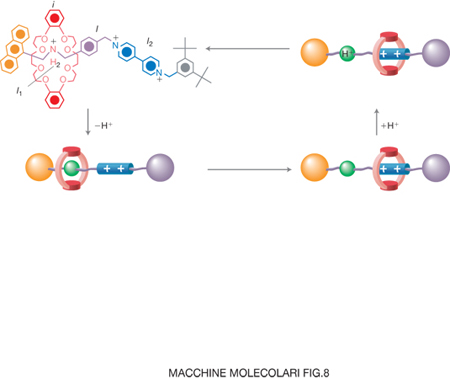
L'esperienza acquisita con i più semplici prototipi di nanomacchine artificiali ha permesso di progettare e costruire sistemi di complessità sempre maggiore. Per es., lo sviluppo in senso tridimensionale della navetta controllata da energia chimica (fig. 6) ha portato alla costruzione di quello che può essere definito un ascensore nanometrico.

Come mostrato in fig. 8, esso è costituito da un componente a tre braccia r, ciascuna delle quali contiene due stazioni, uno ione ammonio e uno ione dipiridinio, e da una piattaforma molecolare s ottenuta dalla fusione di tre anelli. Quando i due componenti si trovano assieme in soluzione, le tre braccia di r si infilano nei tre anelli di s; si ottiene così una struttura a triplo pseudorotassano, stabilizzata da forti legami a idrogeno, in cui i tre anelli di s circondano le tre stazioni ammonio di r. Se però si aggiunge una base, le unità ammonio vengono deprotonate, i legami a idrogeno vengono rotti e, di conseguenza, gli anelli si spostano sulle unità dipiridinio, con le quali danno un'interazione donatore-accettore; per successiva aggiunta di acido, il sistema ritorna alla struttura iniziale. Schematicamente (fig. 8 B), il sistema può quindi essere rappresentato come una piattaforma incardinata a tre colonne che sale e scende fra due piani in seguito a stimoli (comandi) provenienti dall'esterno.
Movimenti rotatori. - Un catenano è un sistema formato da due molecole ad anello che sono incatenate una all'altra in cui, in seguito a un'opportuna progettazione, è possibile far ruotare un anello rispetto all'altro (fig. 4 D).
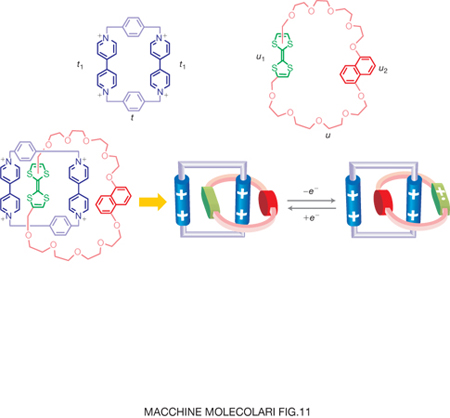
Per evidenziare questo movimento, però, occorre che almeno uno dei due anelli sia non simmetrico, come è appunto il caso del sistema illustrato nella fig. 9. Tale catenano è costituito dall'anello t, che contiene due unità t1 uguali ed elettron-accettrici, e dall'anello u, che contiene due unità elettron-donatrici diverse, u1 e u2, con u1 più forte di u2. La struttura stabile è quella in cui l'unità u1 è contenuta all'interno dell'anello t; una tale struttura permette, infatti, l'interazione di u1 con entrambe le unità t1 dell'anello. Al fine di far ruotare l'anello, è necessario destabilizzare questa struttura: ciò può essere ottenuto con uno stimolo elettrochimico il quale, sottraendo un elettrone all'unità u1, annulla del tutto la sua proprietà di donare elettroni. La struttura più stabile diventa, quella con l'unità u2 all'interno dell'anello t, situazione che viene raggiunta per rotazione di 180° dell'anello u. A questo punto, se l'elettrone precedentemente tolto è restituito, sempre mediante uno stimolo elettrochimico, all'unità u1, allora essa riacquista le sue caratteristiche elettron-donatrici e, di conseguenza, l'anello u ruota nuovamente ripristinando la struttura iniziale. I sistemi del tipo appena descritto (rotazione di un anello azionata da energia elettrica), per quanto siano molto interessanti, sono limitati dal fatto che è impossibile dire se i due moti dell'anello u corrispondano a una rotazione completa oppure a due semirotazioni che abbiano senso opposto.

Un esempio di motore rotante nanometrico artificiale azionato solo dalla luce è quello illustrato nella fig. 10. È ben noto che, allo stesso modo dei composti con un doppio legame −N=N−, anche quelli che contengono un doppio legame −C=C− (lo stilbene, fig. 10 A) possono esistere come isomeri trans e cis. In tali sistemi l'eccitazione luminosa di uno dei due isomeri, per fare un esempio, dell'isomero trans, può causare la rotazione di 180° di una delle due subunità molecolari, con formazione dell'isomero cis. L'eccitazione di quest'ultimo può poi causare il ritorno all'isomero trans iniziale, tramite una successiva rotazione di 180°.
In composti semplici come lo stilbene la direzione del moto rotatorio è casuale, per cui non è affatto detto che la trasformazione trans → cis → trans avvenga attraverso una rotazione completa (cioè di 360° nello stesso senso); la trasformazione cis → trans, infatti, può comportare una rotazione di 180° in senso opposto a quello della trasformazione trans → cis. È stato, tuttavia, sintetizzato un composto più complesso (v, fig. 10 B) in cui, a causa di impedimenti sterici, sia l'isomero trans sia quello cis non sono planari ed esistono ciascuno in due configurazioni distorte (isomeri chirali). Questa particolarità facilita la rotazione in un senso rispetto all'altro rendendo possibile una rotazione fotoindotta completa di 360°.
Prospettive delle applicazioni
Le m. m. artificiali che sono state discusse negli esempi sopra riportati sono interessanti non soltanto per il loro aspetto meccanico, ma anche dal punto di vista informatico (Ball 2000). Tali macchine, infatti, possono esistere in due stati distinti e convertibili mediante stimoli esterni di varia natura: luminosa, chimica oppure elettrica.
Su questi sistemi, dunque, si possono scrivere informazioni secondo la logica binaria. Lo stato nel quale si trova il sistema, d'altra parte, può essere letto facilmente, poiché alcune sue proprietà (l'assorbimento o l'emissione di luce di specifica lunghezza d'onda ecc.) cambiano drasticamente nel passaggio da uno stato all'altro. Alcuni scienziati vedono in queste e in altre ricerche collegate ai primi passi verso la costruzione di una nuova generazione di computer (computer chimici) che, basandosi su componenti di dimensioni nanometriche, potrebbero offrire prestazioni di gran lunga superiori a quelle dei calcolatori oggi in uso. La cosa, forse, non stupisce più di tanto qualora si pensi alle capacità di quello stupefacente computer chimico che è rappresentato dal cervello dell'uomo.
Bisogna anche sottolineare che tutto quanto è stato qui descritto si riferisce a sistemi studiati in soluzione, dove un numero molto grande di macchine individuali, in seguito allo stimolo ricevuto, compiono la stessa funzione, ma operano indipendentemente l'una dall'altra. Si tratta, cioè, di sistemi incoerenti e, come tali, difficili da utilizzare per taluni scopi pratici. Dopo questo essenziale primo passo, che ha permesso di dimostrare che è possibile progettare e costruire macchine nanometriche, si possono però organizzare le nanomacchine in modo da interfacciarle con il mondo macroscopico. Questo può essere realizzato facendo aderire un certo numero (per fare un esempio, qualche centinaia) di macchine, tutte nello stesso senso, su una superficie, in modo tale da riuscire a ottenere un insieme, ancora nanometrico, in cui il movimento (per es., lo spostamento di un anello in un rotassano) avvenga in fase per tutte le molecole dell'insieme, in modo tale che la variazione nelle proprietà delle singole macchine divenga un fenomeno collettivo misurabile.
Tentativi in questa direzione si stanno compiendo in numerosi laboratori e in numerosi Paesi. In alternativa, è possibile pensare di operare su una singola macchina, che venga fissata e orientata su un supporto; questo approccio, tuttavia, comporta il superamento di notevoli difficoltà, che sono imputabili al fatto che il segnale di una singola macchina risulta molto debole.
bibliografia
R.P. Feynman, There's plenty of room at the bottom, in Engeneering and science, 1960, 23, pp. 22-36.
K.E. Drexler, Engines of creation. The coming era of nanotechnology, Garden City (NY) 1986.
Ph. Ball, Chemistry meets computing, in Nature, 2000, 406, pp. 118-20.
R.E. Smalley, Of chemistry, love and nanorobots, in Scientific American, 2001, 285, 3, pp. 68-69 (trad. it. in Le scienze, 2001, 398, pp. 58-59).
V. Balzani, A. Credi, M. Venturi, Molecular devices and machines. A journey into the nanoworld, Weinheim 2003.
D.S. Goodsell, Bionanotechnology. Lessons from nature, Hoboken (NJ) 2004.
© Istituto della Enciclopedia Italiana - Riproduzione riservata


